导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
170 播放
收藏
片段保存及分享
播放有问题?
请戳这里
新型微创手术机器人
时长:4 分钟
类别:智能机器人技术
简介:我们展示了一种全新的微创手术机器人。Memic的Hominis系统是一种新型的手术机器人,专门设计用于经阴道进入,协助外科医生做妇科手术。
标签:
教学
智能机器人
手术机器人
相关视频:
未来的太空机器人
机器人在我们日常操作中变得越来越重要,有些机器人的设计灵感来自真实的动物,有些机器人在危险环境中执行任务,比如在太空中。同时,科学家们正在创造全新的机器人以各种方式协助未来的太空任务。
武器探测安保机器人
一群新的安保机器人被部署到商场和机场,与安保人员一起巡逻。
手术机器人的发展
手术机器人是一项医疗技术创新,旨在减少侵入性手术的误差范围,有助于使外科手术更安全、更精确。医疗保健正在经历技术颠覆,手术机器人的发展正在帮助外科医生进行更少侵入性的手术。
太空机器人的合作
多机器人合作是被视为行星探索中有前景的几项关键技术之一。在PRO-ACT项目中,这些技术得到了应用和进一步发展,这些机器人系统预计将共同执行任务。
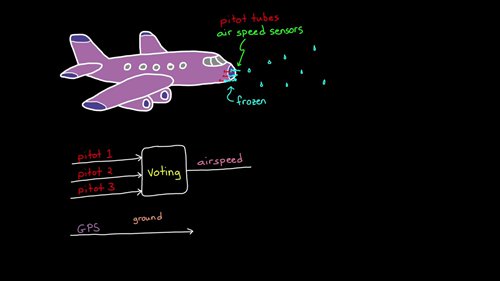
传感器融合与跟踪1
本视频概述了传感器融合的概念,以及它对于设计自主系统所起到的作用。
LeoBots清洁机器人
LeoBots是一系列清洁机器人,由4种不同的型号组成。每台机器都被要求执行一项特定的任务,以便在其清洁操作中达到最高效率。
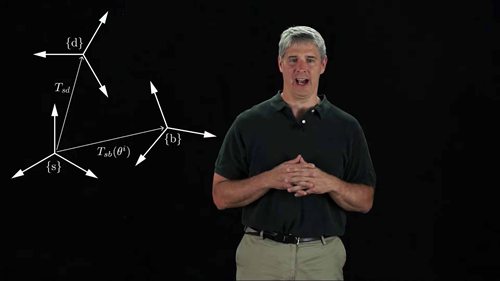
逆向运动学3
这一集将延续上一集的内容,介绍数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由变换矩阵表示。
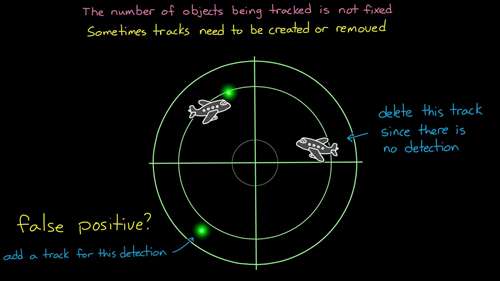
传感器融合与跟踪5
目标跟踪是利用各种类型的传感器获得的关于目标信息,对目标的真实状态以及未来的状态进行估计和预测的一门技术。这一集我们采用的是使用交互式多模型算法,来进行目标跟踪的方法。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问