导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1859 播放
收藏
片段保存及分享
播放有问题?
请戳这里
传感器融合与跟踪1
时长:13 分钟
类别:智能机器人技术
简介:本视频概述了传感器融合的概念,以及它对于设计自主系统所起到的作用。
标签:
教学
智能机器人技术
传感器融合
相关视频:
带速度输入的运动控制3
这段短片介绍了机器人的任务空间运动控制,其中控制输入为关节速度,末端执行器的期望运动表示为SE(3)中的位形X。
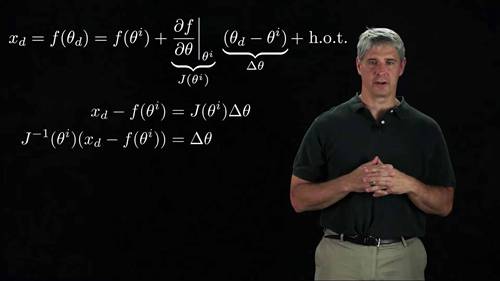
逆向运动学2
这个视频介绍了数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由一个最小坐标集合表示。
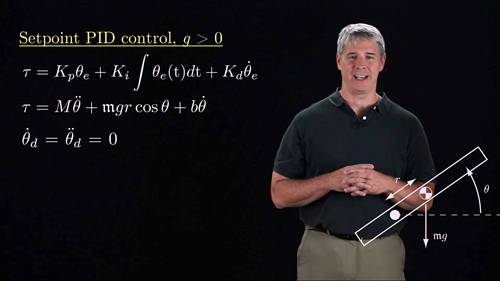
扭矩或力输入的运动控制2
这一集里,我将比较PD和PID控制对单个机器人关节在重力下运动的设定值控制,其中控制输入是一个力矩。
多足机器人步态规划
在本视频中,我们提出了一种混合整数双层规划的凸组合算法,以一种高效的计算方式同时规划接触位置、步态过渡。
机器人的智能视觉系统
工业研究所研发出的只能视觉系统能使机器人解读自己所看到的视觉世界,根据视觉信息行动,并从经验中学习,并不断改进性能。
使用触觉手套控制机器人
我们亲身体验了HaptX触觉手套与ShadowRobotCompany的极为灵巧的远程操作机器人的集成。使用这些VR手柄,我们不仅能够操纵像魔方这样复杂的物体,还可以以自然而直观的方式感受我们抓握的物体!
混合运动力控制
本视频介绍了混合运动力控制:控制机器人在无约束方向上产生期望的运动和在约束方向上产生期望的力。
仿生机器人
飯田史也的研究探讨了如何通过从自然中汲取灵感来改进机器人技术,飯田的实验室里有各种跳跃机器人,可能受到蚱蜢、人类甚至恐龙的启发。
观看记录:




 内容总结
内容总结 章节片段
章节片段 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问