导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1785 播放
收藏
片段保存及分享
播放有问题?
请戳这里
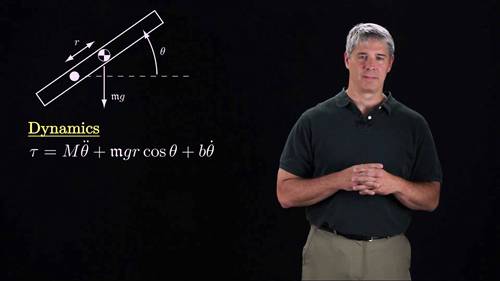
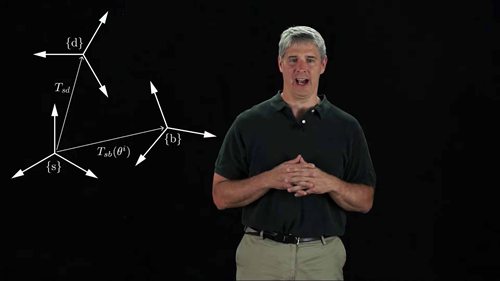
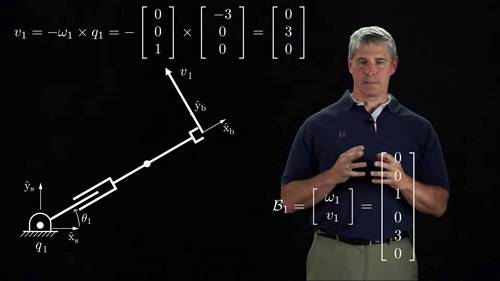
混合运动力控制
时长:6 分钟
类别:智能机器人技术
简介:本视频介绍了混合运动力控制:控制机器人在无约束方向上产生期望的运动和在约束方向上产生期望的力。
标签:
教学
智能机器人技术
控制系统
相关视频:
人形机器人:阿波罗
美国人形机器人开发公司Apptronik公布了一款新型机器人阿波罗,阿波罗可以像人类一样移动、弯曲手臂和抓握物体。
酒店服务机器人
Botlr是一个处于测试阶段的酒店服务机器人。我们对它进行了严格测试,让它进行交付任务。这个小型机器人外观时尚,有赛车条纹,可以从Aloft酒店的前台将小物品送到客人的客房。
扭矩或力输入的运动控制1
本视频介绍了针对单个机器人关节的比例积分导数(PID)控制。
逆向运动学3
这一集将延续上一集的内容,介绍数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由变换矩阵表示。
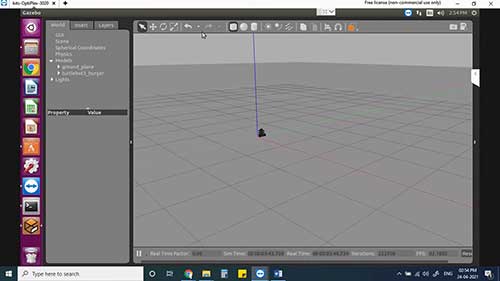
了解Gazebo模拟器
Gazebo是一款3D动态模拟器,能够在复杂的室内和室外环境中准确有效地模拟机器人群,与游戏引擎提供高保真度的视觉模拟类似,设计机器人是其典型应用之一。
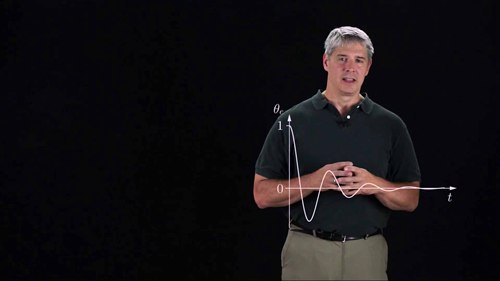
线性误差动力学
本视频介绍了线性误差响应,误差动力学由线性常微分方程来描述,也可以表示为一阶耦合微分方程,xdot = Ax。
正向运动学2
我将在视频中介绍开链机器人正运动学中,以末端执行器坐标系表示的指数积公式。
研发新型仿生机器人
哈佛大学Wyss仿生工程研究所的仿生机器人平台通过研究大自然来获取灵感,以开发比传统机器人更智能、更柔软、更安全的新型机器人。
观看记录:




 内容总结
内容总结 章节片段
章节片段 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问