导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1836 播放
收藏
片段保存及分享
播放有问题?
请戳这里
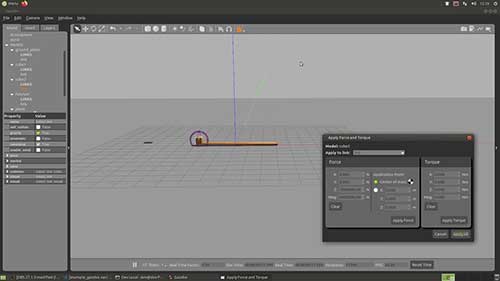
扭矩或力输入的运动控制1
时长:4 分钟
类别:智能机器人技术
简介:本视频介绍了针对单个机器人关节的比例积分导数(PID)控制。
标签:
教学
智能机器人技术
控制系统
相关视频:
机器人建模
Gazebo是一款免费的机器人仿真软件,我们学习如何使用Gazebo模拟器以及ROS操作系统搭建机器人。
人形机器人腿
Hyperleg是一款具有高度动态性的机器人腿,可进行各种复杂、精细的运动,如行走、短跑、跳跃或跳舞。
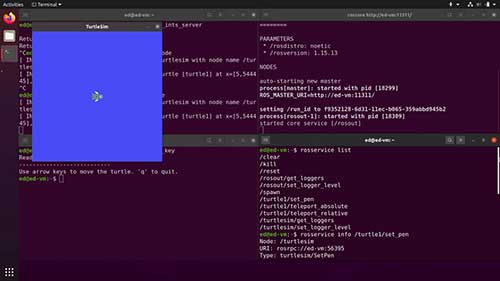
了解ROS话题通信
我们将在ROS中启动几个节点并对它们进行内省,以便了解什么是ROS话题通信。
机器猎豹自主避障
在机器人的飞速发展过程中,麻省理工学院的研究人员训练了一只机器猎豹,使其能够在奔跑时看到并跳过障碍物。这使得这款四足机器人成为首个能够自主奔跑并跳过障碍物的机器人。
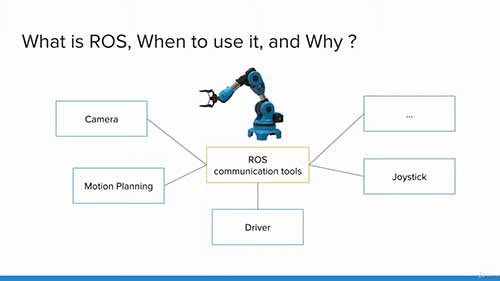
ROS基础
机器人的共同点是它们都可以通过ROS(机器人操作系统)进行控制。ROS是一种中间件和开源框架,专门用于机器人应用。你对ROS了解得越多,你就越容易编程和理解任何机器人的代码。
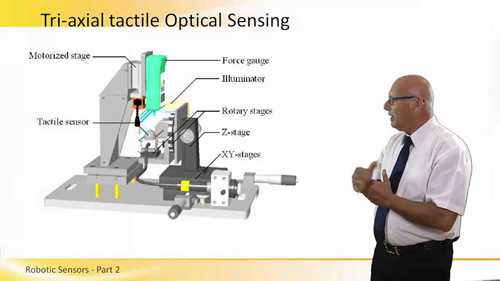
机器人用传感器2
在该教程的第一部分中,我们学习了常用的机器人传感器,那么在这一集里我们将学习一些较特殊的传感器,如,扫描传感器,旋转传感器,障碍物探测器,红外温度传感器,极化传感器等。
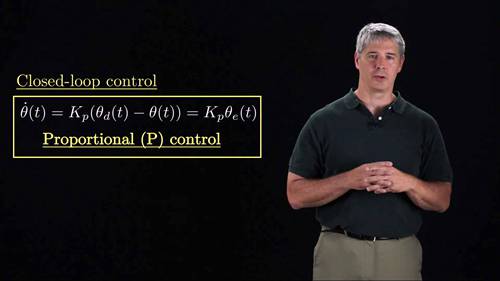
带速度输入的运动控制1
这个视频介绍了单自由度系统位置的比例(P)控制,其中控制输入是速度。
微创手术外科机器人
我们正在重新构想手术机器人技术,使其更少侵入性、更有能力,只需一个直径1.8厘米的小切口。我们的机器人最大限度地增大了腹部可视化范围。
观看记录:




 内容总结
内容总结 章节片段
章节片段 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问