导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1675 播放
收藏
片段保存及分享
播放有问题?
请戳这里
多足机器人步态规划
时长:3 分钟
类别:智能机器人技术
简介:在本视频中,我们提出了一种混合整数双层规划的凸组合算法,以一种高效的计算方式同时规划接触位置、步态过渡。
标签:
教学
智能机器人技术
多足机器人
相关视频:
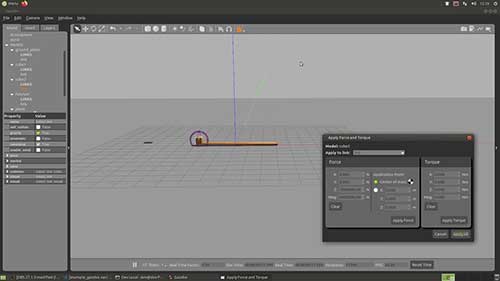
机器人建模
Gazebo是一款免费的机器人仿真软件,我们学习如何使用Gazebo模拟器以及ROS操作系统搭建机器人。
仿生雨燕机器人
超逼真的雨燕机器人,简约而不简单!它不仅可以自主飞行,还可以成群结队进行飞行表演!
人工智能机器人
随着人工智能技术的不断发展,智能机器人也层出不穷,视频盘点了截至2019年,研发的功能最强大的智能机器人。
未来的太空机器人
机器人在我们日常操作中变得越来越重要,有些机器人的设计灵感来自真实的动物,有些机器人在危险环境中执行任务,比如在太空中。同时,科学家们正在创造全新的机器人以各种方式协助未来的太空任务。
OceanOneK水下机器人1
这款潜水机器人配备了触觉反馈系统和立体视觉,现在能够下潜一千米深入海洋,使其操作人员感觉自己也在探索沉船和其他深水目的地。?
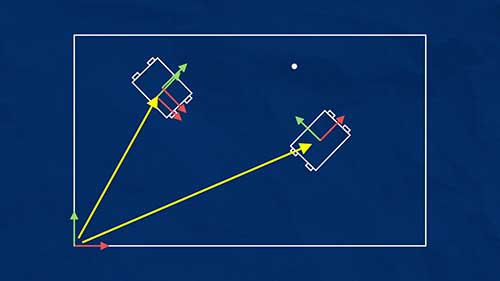
ROS变换系统TF
ROS变换系统TF是ROS中的一个重要组件,用于处理机器人在不同坐标系下的运动和姿态变换。TF可以帮助机器人在不同坐标系之间进行转换,使得机器人可以在不同坐标系下进行运动和感知。
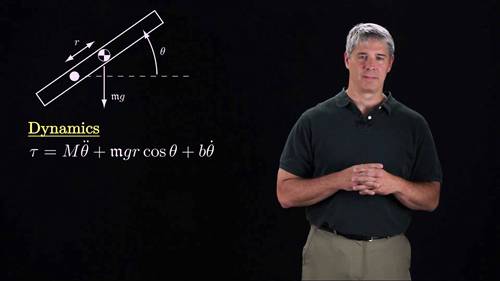
扭矩或力输入的运动控制1
本视频介绍了针对单个机器人关节的比例积分导数(PID)控制。
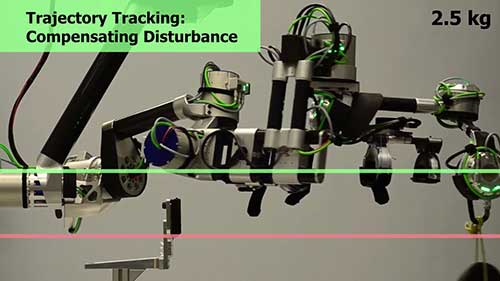
机器人选择性顺应控制实验
该实验比较了位置控制器对补偿和未补偿干扰的反应,以展示力矩可控制的机器人关节执行机构与6自由度交互力传感器相结合的好处。
观看记录: