导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
222 播放
收藏
片段保存及分享
播放有问题?
请戳这里
LeoBots清洁机器人
时长:3 分钟
类别:智能机器人技术
简介:LeoBots是一系列清洁机器人,由4种不同的型号组成。每台机器都被要求执行一项特定的任务,以便在其清洁操作中达到最高效率。
标签:
教学
智能机器人
服务机器人
相关视频:
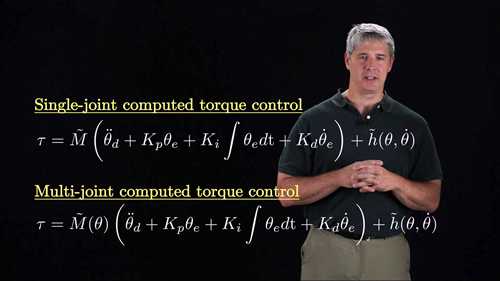
扭矩或力输入的运动控制3
该教程介绍了机器人计算力矩运动的控制方法,其中控制输入是力矩或力。
机器人是如何制造的
机器人已经广泛应用到了制造业当中。但现在,它们正在走进我们的日常生活。了解目前的技术是如何实现让机器人在生活的方方面面协助人类的吧,顺便看看机器人是如何制造出来的!
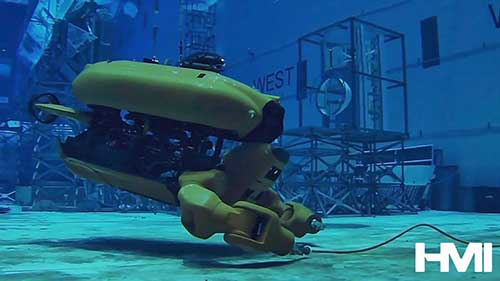
Aquanaut水下机器人
Aquanaut,由休斯顿机械公司开发,可以将自己从设计用于长途巡航的灵活潜艇转变为能够执行复杂操作任务的半人形机器人。
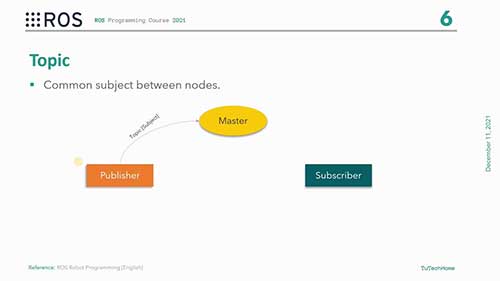
了解ROS主节点与话题
ROS中的主节点是什么?我们为什么需要一个主节点?ROS使用什么类型的通信来进行节点间的通信?
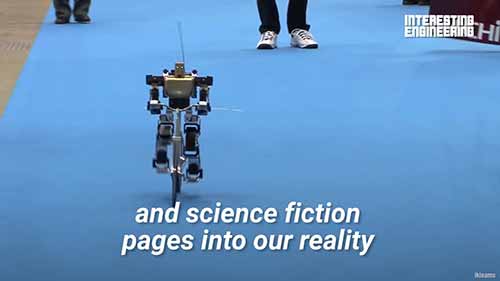
机器猎豹自主避障
在机器人的飞速发展过程中,麻省理工学院的研究人员训练了一只机器猎豹,使其能够在奔跑时看到并跳过障碍物。这使得这款四足机器人成为首个能够自主奔跑并跳过障碍物的机器人。
利用深度强化学习规划四足步态
ETH的Anymal研究团队为感知地形运动制订了特定的神经网络策略,在模拟三维环境中,分别使用“本体感受”和“外在感受”来执行“落脚点与肢体联动规划”。
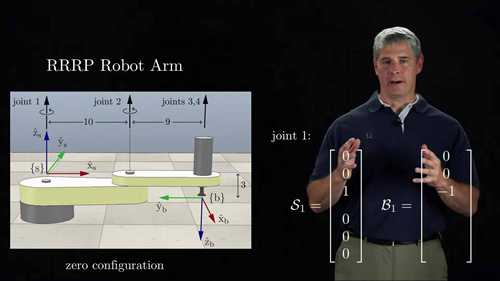
正向运动学3
我将在视频中演示指数积正运动学在RRRP机器人手臂上的应用。
达芬奇机器人手术系统
达芬奇机器人手术系统是一种创新的微创手术程序。通过观看它的实际操作,了解更多关于达芬奇机器人手术系统的信息。
观看记录:



 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问