导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
205 播放
收藏
片段保存及分享
播放有问题?
请戳这里
Aquanaut水下机器人
时长:11 分钟
类别:智能机器人技术
简介:Aquanaut,由休斯顿机械公司开发,可以将自己从设计用于长途巡航的灵活潜艇转变为能够执行复杂操作任务的半人形机器人。
标签:
教学
智能机器人
水下机器人
相关视频:
机器人路径规划8
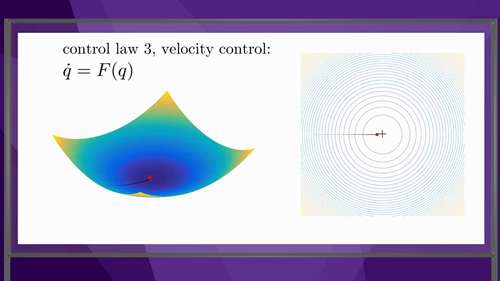
本集介绍的是基于路径规划的人工势场法,人工势场法是局部路径规划的一种比较常用的方法。这种方法假设机器人在一种虚拟力场下运动。
传感器融合与跟踪1
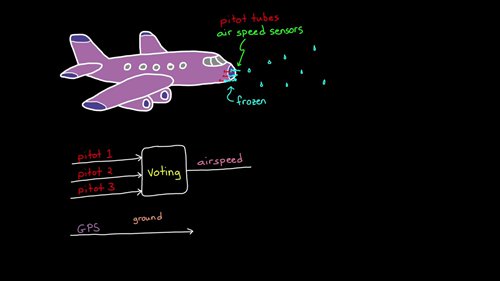
本视频概述了传感器融合的概念,以及它对于设计自主系统所起到的作用。
逆向运动学2
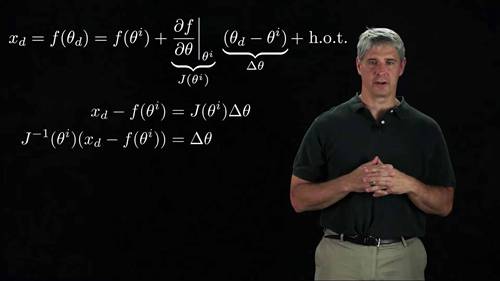
这个视频介绍了数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由一个最小坐标集合表示。
颠覆农业领域的机器人
农业机器人让农民得以从效率低,重复高和乏味的劳作中解放双手,使他们能够更加专注于提高整体产量。目前农业上一些最常见的机器人主要用于农产品收获和采摘以及杂草控制。
酒店服务机器人
Botlr是一个处于测试阶段的酒店服务机器人。我们对它进行了严格测试,让它进行交付任务。这个小型机器人外观时尚,有赛车条纹,可以从Aloft酒店的前台将小物品送到客人的客房。
机器人用传感器1
机器人变得越来越智能,这与它们分析传感器状态的能力提升有关,本视频将回顾机器人会使用的不同类型传感器,包括触觉、声音、光、超声波、速度、振动传感器等。
太空机器人研发挑战
NASA的太空机器人竞赛要求团队开发R5机器人,R5机器人需要具备有效地协助NASA任务(如前往火星)的能力。
多足机器人的步态和轨迹优化
本视频介绍了一种基于能耗最优的多足机器人综合步态优化方法,将步态优化过程转换为两个嵌套的子优化问题。
观看记录: