导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1632 播放
收藏
片段保存及分享
播放有问题?
请戳这里
多足机器人马克思
时长:4 分钟
类别:智能机器人技术
简介:由CSIRO公司开发的多足机器人马克思是一个超轻的六足机器人,它可在具有挑战性的室内和室外环境中进行探索工作。
标签:
教学
智能机器人技术
多足机器人
相关视频:
双足机器人的反馈控制
CassieBlue是一个双足机器人,它的反馈控制器是一种用于控制机器人动态步行的控制系统。这个控制器是由密歇根大学的研究团队开发的,旨在使CassieBlue能够在各种复杂的环境中实现稳定的步行。
Thorvald农业机器人
Thorvald是由挪威奥斯陆大学(NMBU)的机器人和控制组开发的一种机器人平台。这个平台旨在为农业和园艺领域提供自动化解决方案,以帮助农民和园艺工作者进行种植、收获和其他农业任务。
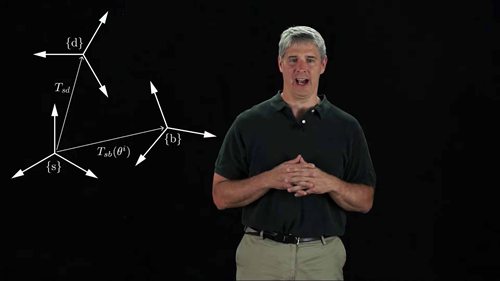
逆向运动学3
这一集将延续上一集的内容,介绍数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由变换矩阵表示。
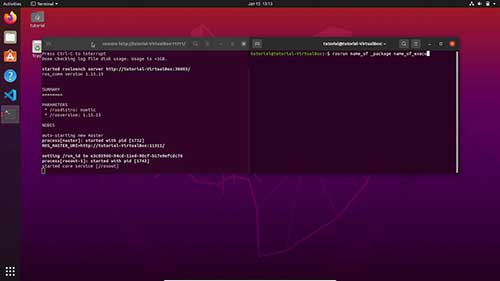
理解ROS节点与话题
节点是ROS软件包中的一个可执行文件。ROS节点使用ROS客户端库与其他节点通信。节点可以发布或订阅话题,也可以提供或使用服务。
机器猎豹自主避障
在机器人的飞速发展过程中,麻省理工学院的研究人员训练了一只机器猎豹,使其能够在奔跑时看到并跳过障碍物。这使得这款四足机器人成为首个能够自主奔跑并跳过障碍物的机器人。
使用触觉手套控制机器人
我们亲身体验了HaptX触觉手套与ShadowRobotCompany的极为灵巧的远程操作机器人的集成。使用这些VR手柄,我们不仅能够操纵像魔方这样复杂的物体,还可以以自然而直观的方式感受我们抓握的物体!
微创手术外科机器人
我们正在重新构想手术机器人技术,使其更少侵入性、更有能力,只需一个直径1.8厘米的小切口。我们的机器人最大限度地增大了腹部可视化范围。
了解机器人电源
机器人要想动起来,需要多大电压,多大电流?我们将在视频中讲解机器人的电池组和电源。
观看记录: