导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
223 播放
收藏
片段保存及分享
播放有问题?
请戳这里
了解机器人电源
时长:17 分钟
类别:智能机器人技术
简介:机器人要想动起来,需要多大电压,多大电流?我们将在视频中讲解机器人的电池组和电源。
标签:
教学
智能机器人
机器人控制
相关视频:
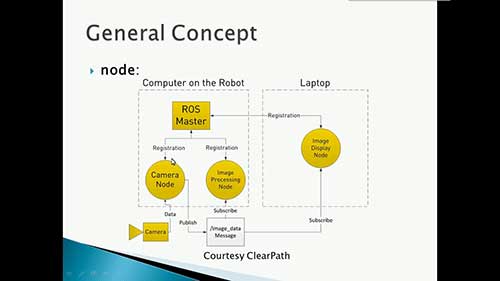
ROS入门01:文件系统
ROS基本概念介绍,包括节点管理器、节点、话题、消息和服务通信以及文件系统。
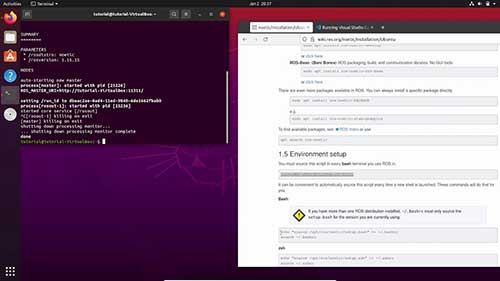
如何创建ROS工作空间02
学习如何在运行在虚拟机上的Ubuntu20.04上安装ROSNoetic。安装完成后,你将能够在终端上启动ROS环境。
Turtlesim功能包:控制乌龟运动
我们将把目前为止学到的所有知识整合起来,制作一个Turtlesim项目。你将学习如何编程Turtlesim,控制乌龟去到目标位置。
酒店服务机器人
Botlr是一个处于测试阶段的酒店服务机器人。我们对它进行了严格测试,让它进行交付任务。这个小型机器人外观时尚,有赛车条纹,可以从Aloft酒店的前台将小物品送到客人的客房。
世界领先的机器人手术系统
盘点世界上最先进的机器人手术系统,包括SurgiBot、Axis、Flex、Enos、达芬奇等。
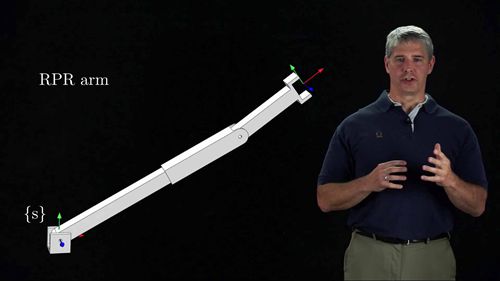
正向运动学1
我将在视频中介绍开链机器人正运动学中,在空间坐标系中表示的指数积公式。
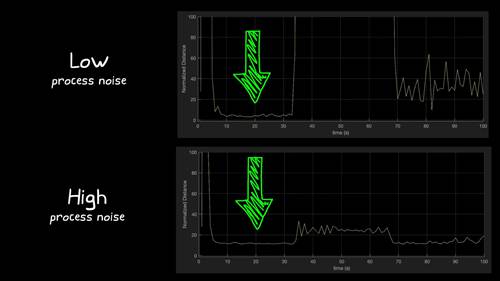
传感器融合与跟踪4
本视频解释了如何通过使用交互式多模型滤波器估计状态来改善跟踪单个对象。
机器人控制应用概述
介绍了德国航空航天中心开发的扭矩控制人形机器人TORO的硬件和控制应用。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问