导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1768 播放
收藏
片段保存及分享
播放有问题?
请戳这里
传感器融合与跟踪4
时长:16 分钟
类别:智能机器人技术
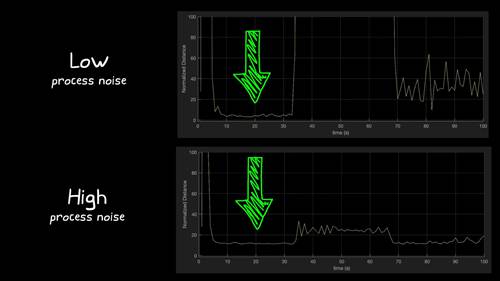
简介:本视频解释了如何通过使用交互式多模型滤波器估计状态来改善跟踪单个对象。
标签:
教学
智能机器人技术
传感器融合
相关视频:
传感器融合与跟踪4
本视频解释了如何通过使用交互式多模型滤波器估计状态来改善跟踪单个对象。
农业机器人的发展
农业自20世纪20年代首次引入机器人技术,农民已普遍使用GPS引导的播种机、喷雾器和联合收割机。但有一项工作对机器人来说一直非常困难:采摘浆果。本视频将向你介绍采摘草莓的农业机器人。
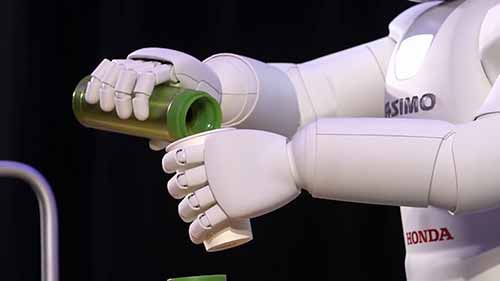
丰田家用机器人
田研究所(TRI)专注于研究辅助型家用机器人。TRI正在教一个通用机器人在真实的家庭中执行有用的人类级别的任务。
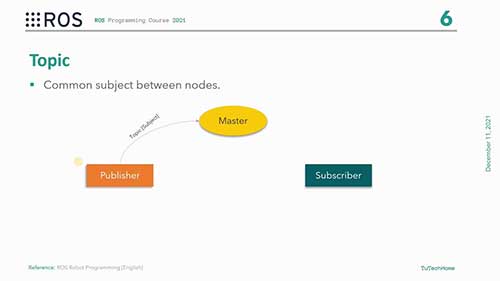
了解ROS主节点与话题
ROS中的主节点是什么?我们为什么需要一个主节点?ROS使用什么类型的通信来进行节点间的通信?
机器人起源
智能型机器人是人类最渴望能够早日制造出来的机器朋友。然而要制造出一台智能机器人并不容易,仅仅是让机器模拟人类的行走动作,科学家们就要付出了数十甚至上百年的努力。机器人到底是如何发明出来的呢?收看视频吧。
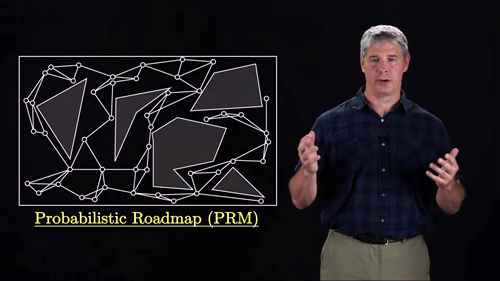
机器人路径规划7
PRM是一种基于图搜索的方法,它将连续空间转换成离散空间,再利用A*等搜索算法在路线图上寻找路径,以提高搜索效率。
ROS命令行工具
ROS(机器人操作系统)的命令行工具是一组用于在ROS环境中执行各种操作的命令行工具。这些工具可以用于启动、管理和监控ROS节点、话题、服务以及其他ROS相关的组件。
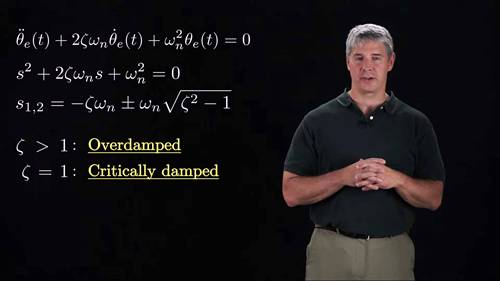
二阶误差动力学
本视频研究的是以二阶线性常微分方程来描述的误差动力学模型。
观看记录:



 内容总结
内容总结 章节片段
章节片段 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问