导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
197 播放
收藏
片段保存及分享
播放有问题?
请戳这里
ROS命令行工具
时长:20 分钟
类别:智能机器人技术
简介:ROS(机器人操作系统)的命令行工具是一组用于在ROS环境中执行各种操作的命令行工具。这些工具可以用于启动、管理和监控ROS节点、话题、服务以及其他ROS相关的组件。
标签:
教学
智能机器人
机器人操作系统
相关视频:
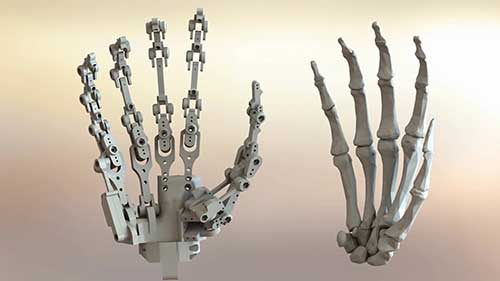
仿生机械手 01 3D打印仿生手
3D打印仿生机械电子手的零部件以后,然后对其设计和构造进行深入分析。
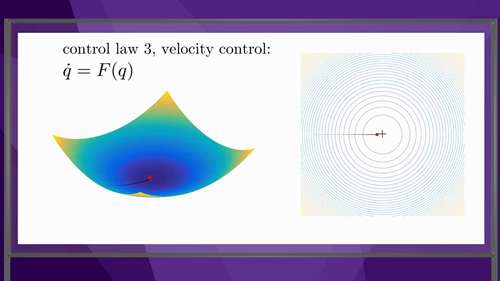
带速度输入的运动控制2
本视频介绍了单自由度系统位置的比例积分(PI)控制,以及前馈加反馈PI控制。
通过脑机接口技术获得触觉
美国国防部高级研究计划局首次在人体上演示了一项前沿技术,即将机械臂与神经系统相连接,让个体从大脑中感知触觉。
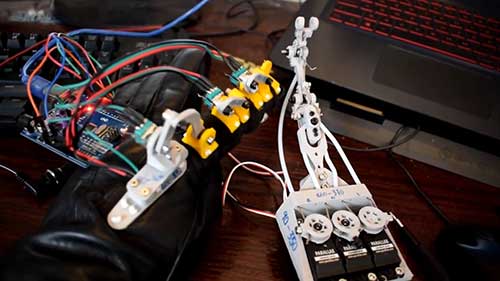
仿生机械手 02 设计仿生手伺服
手部的另一个关节称为MCP(掌指)关节,我们将了解掌指关节的设计和一些定制伺服系统,不断进行实验,以找到合适的仿生手伺服系统。
用大脑来控制物体
OpenBCI是一个基于脑机接合的开源硬件,它允许艺术家、设计师和工程师进行创新,同时作为研究和创新的工具。你可以在这里用大脑控制玩具蜘蛛,玩具鲨鱼。
真实存在的10种机器人
来自德国的机器人研发公司Festo的机器人动物家族正在壮大。该公司陆续推出了许多新型仿生机器人,例如:一群可以相互交流的蚂蚁,以及蝴蝶和蜻蜓,这些仿生机器人有什么特点呢?能做什么?具有相应昆虫的行为特征吗?收看视频。
何谓ROS消息
介绍ROS的几个重要话题通信以及消息命令,并旨在为ROS用户提供对各种概念的基础理解,了解不同项目的基础知识和应用。
机器人路径规划8
本集介绍的是基于路径规划的人工势场法,人工势场法是局部路径规划的一种比较常用的方法。这种方法假设机器人在一种虚拟力场下运动。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问