导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1671 播放
收藏
片段保存及分享
播放有问题?
请戳这里
机器人起源
时长:5 分钟
类别:智能机器人技术
简介:智能型机器人是人类最渴望能够早日制造出来的机器朋友。然而要制造出一台智能机器人并不容易,仅仅是让机器模拟人类的行走动作,科学家们就要付出了数十甚至上百年的努力。机器人到底是如何发明出来的呢?收看视频吧。
标签:
教学
智能机器人技术
机器人概论
相关视频:
行李运输机器人
人工智能是当今炙手可热的领域,其应用在医疗、刑侦、艺术等领域都被广泛应用。那么我们来看看人工智能在机场的应用。本视频展示了美国达拉斯市福特·伍斯机场机器人为国际航线旅客实施行李转运。
盘点15种先进的农业机器人
农业机器人通常配备了各种传感器和智能控制系统,能够自主地感知和应对环境变化,从而提高生产效率、降低劳动成本。本片介绍了目前技术最先进的15种机器人。
关于ROS的五个关键要素
我们介绍了开始使用ROS开发机器人之前需要了解的五个要素。
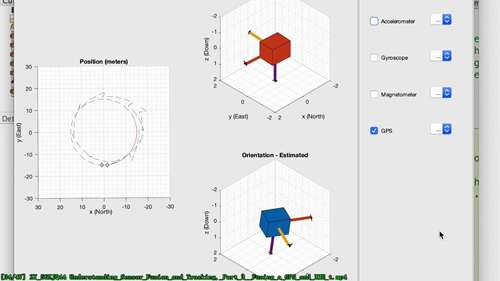
传感器融合与跟踪3
我将继续接着上一集的内容讨论使用传感器融合来定位的方法。
机器人用传感器1
机器人变得越来越智能,这与它们分析传感器状态的能力提升有关,本视频将回顾机器人会使用的不同类型传感器,包括触觉、声音、光、超声波、速度、振动传感器等。
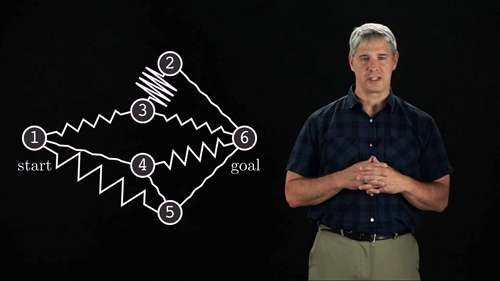
机器人路径规划4
A* 算法因为它的高效和准确而被广泛应用于路径发现和图遍历等任务上。这种算法是在图中寻找最优路径最流行和有效的方法之一。
使用触觉手套控制机器人
我们亲身体验了HaptX触觉手套与ShadowRobotCompany的极为灵巧的远程操作机器人的集成。使用这些VR手柄,我们不仅能够操纵像魔方这样复杂的物体,还可以以自然而直观的方式感受我们抓握的物体!
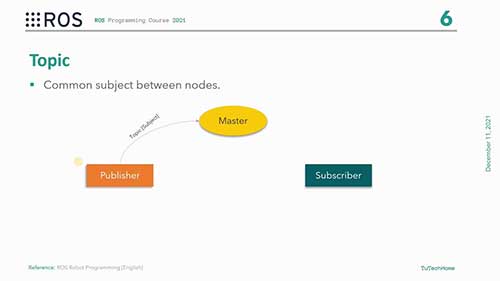
了解ROS主节点与话题
ROS中的主节点是什么?我们为什么需要一个主节点?ROS使用什么类型的通信来进行节点间的通信?
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问