导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1738 播放
收藏
片段保存及分享
播放有问题?
请戳这里
传感器融合与跟踪3
时长:14 分钟
类别:智能机器人技术
简介:我将继续接着上一集的内容讨论使用传感器融合来定位的方法。
标签:
教学
智能机器人技术
传感器融合
相关视频:
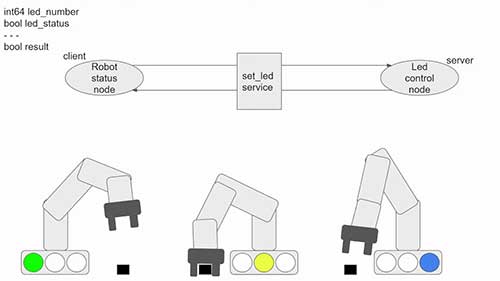
什么是ROS服务
你将理解ROS中服务的概念,并且我们将通过实际的机器人应用示例来解释。我们将比较消息和服务,并阐明如何通过查看原始消息定义在C++中实现它。
探索宇宙的太空机器人
在接下来的几分钟里,我们将带您参观一些最酷的太空机器人,机器人将成为未来宇宙的主要探险者。
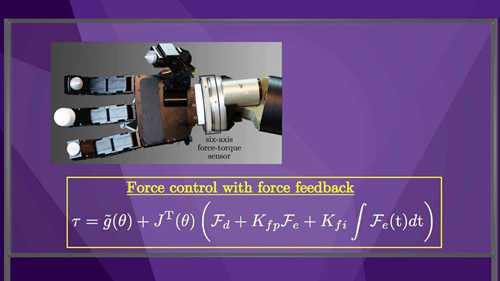
力控制
本教程描述了机器人基于雅可比矩阵转置的力控制,包括有和没有末端执行器力-力矩反馈。
武器探测安保机器人
一群新的安保机器人被部署到商场和机场,与安保人员一起巡逻。
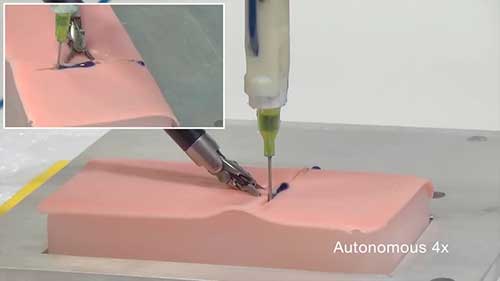
工作中的手术机器人
如今的手术机器人扩展了外科医生的能力;它们可以过滤手颤抖,并且允许进行即使是最优秀的外科医生也无法通过腹腔镜手术的典型长柄工具完成的操作。
使用Gazebo模拟器搭建机器人
我们将学习如何在Gazebo模拟器中仅使用模型编辑器来构建和模拟一个简单的机器人。这个机器人将能够使用深度摄像头检测障碍物并向其移动。
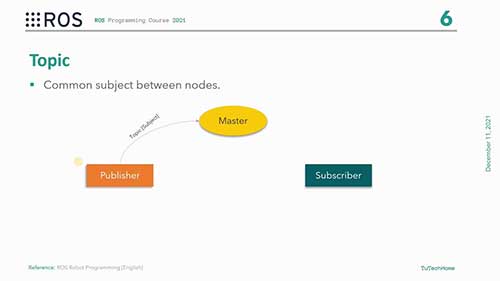
了解ROS主节点与话题
ROS中的主节点是什么?我们为什么需要一个主节点?ROS使用什么类型的通信来进行节点间的通信?
OceanOneK水下机器人1
这款潜水机器人配备了触觉反馈系统和立体视觉,现在能够下潜一千米深入海洋,使其操作人员感觉自己也在探索沉船和其他深水目的地。?
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问