导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
174 播放
收藏
片段保存及分享
播放有问题?
请戳这里
工作中的手术机器人
时长:4 分钟
类别:智能机器人技术
简介:如今的手术机器人扩展了外科医生的能力;它们可以过滤手颤抖,并且允许进行即使是最优秀的外科医生也无法通过腹腔镜手术的典型长柄工具完成的操作。
标签:
教学
智能机器人
手术机器人
相关视频:
机器人混动传动系统
这是一种新型的液压传动方式,采用混合的气液配置,使用N根液压管和1根气动管线来实现具有N个自由度的机器人传动系统。通过触觉传感器,夹持参数可以实时确定,并且可以动态地施加最佳夹持力。
何谓ROS
通过本片,你将了解ROS是什么?以及它的历史、现状和未来!为何它对机器人的制造至关重要。
了解ROS服务通信
我们将在ROS中启动几个节点并对它们进行内省,以了解什么是ROS服务通信。
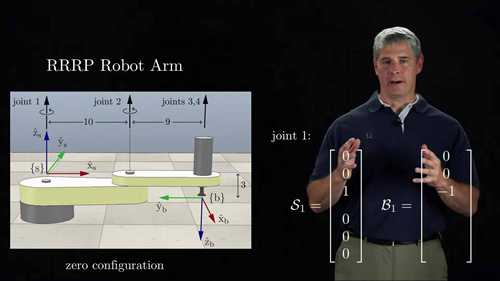
正向运动学3
我将在视频中演示指数积正运动学在RRRP机器人手臂上的应用。
ROS例程:控制乌龟左右旋转
学习如何快速开始使用turtlebot模拟器及其控制。控制乌龟向左右旋转。
柔性机器人
有了我们的触觉传感器,夹持参数可以实时确定,并且可以动态地施加最佳夹持力。机器人通常不是柔软的,但是受章鱼启发,工程师正在创建能够扭曲解决刚性机器人无法处理的问题的机器人。
多足机器人的步态和轨迹优化
本视频介绍了一种基于能耗最优的多足机器人综合步态优化方法,将步态优化过程转换为两个嵌套的子优化问题。
用大脑来控制物体
OpenBCI是一个基于脑机接合的开源硬件,它允许艺术家、设计师和工程师进行创新,同时作为研究和创新的工具。你可以在这里用大脑控制玩具蜘蛛,玩具鲨鱼。
观看记录: