导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
176 播放
收藏
片段保存及分享
播放有问题?
请戳这里
ROS入门01:文件系统
时长:8 分钟
类别:智能机器人技术
简介:ROS基本概念介绍,包括节点管理器、节点、话题、消息和服务通信以及文件系统。
标签:
教学
智能机器人
机器人操作系统
相关视频:
控制系统概述
机器人控制方法多种多样,本视频概述了运动(或位置)控制、力控制、混合运动力控制和阻抗控制等。
关于ROS的10大重点
ROS是一个机器人软件平台,它能为异质计算机集群提供类似操作系统的功能。我们介绍了ROS的10个重要知识点。
Thorvald农业机器人
Thorvald是由挪威奥斯陆大学(NMBU)的机器人和控制组开发的一种机器人平台。这个平台旨在为农业和园艺领域提供自动化解决方案,以帮助农民和园艺工作者进行种植、收获和其他农业任务。
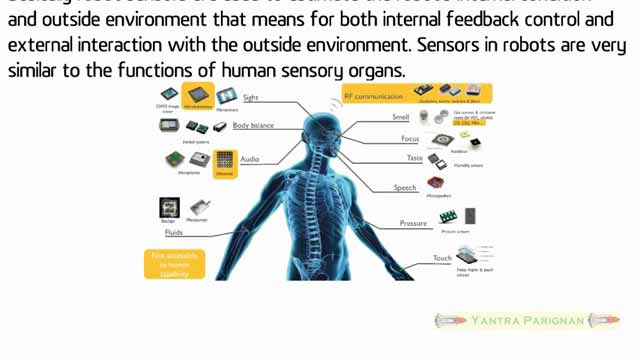
用于机器人的传感器
机器人传感器在机器人的控制中起了非常重要的作用,正因为有了传感器,如位置传感器、速度传感器等,机器人才具备了类似人类的知觉功能和反应能力。
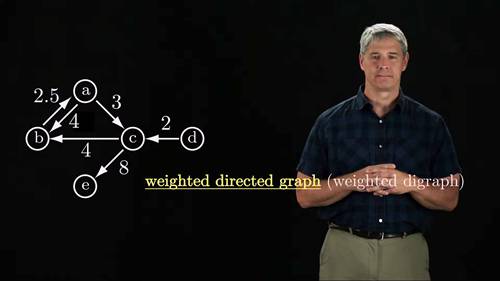
机器人路径规划3
这一集机器人路径规划教程主要介绍了机器人C空间图表算法的无向图、有向图、加权图、非加权图,以及树型图。
Atlas和Handle机器人
波士顿动力公司的机器人Atlas和Handle是世界上最具活力的类人机器人,Atlas已经掌握了倒立、360度翻转、旋转等多项技能,Handle机器人能够载重、下蹲和跨越障碍物,再次让我们大开眼界。让我们一起去看看这两款机器人到底有多先进吧。
OTSAW安保机器人
OTSAW的户外安全和监控机器人。Aquanaut由休斯顿机械公司开发,可以将自己从设计用于长途巡航的灵活潜艇转变为能够执行复杂操作任务的半人形机器人。
多足机器人的步态和轨迹优化
本视频介绍了一种基于能耗最优的多足机器人综合步态优化方法,将步态优化过程转换为两个嵌套的子优化问题。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问