导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1765 播放
收藏
片段保存及分享
播放有问题?
请戳这里
机器人路径规划3
时长:3 分钟
类别:智能机器人技术
简介:这一集机器人路径规划教程主要介绍了机器人C空间图表算法的无向图、有向图、加权图、非加权图,以及树型图。
标签:
教学
智能机器人技术
路径规划技术
相关视频:
何谓ROS话题
ROS的目标是为机器人软件提供一个标准,供开发人员在任何机器人上使用。今天我们将介绍ROS话题以及它们的工作原理。
仿海扁虫机器人
你知道海扁虫是怎么游的吗?没关系,看看这个仿海扁虫机器鱼,你就知道了!
机器人手术系统构成
机器人手术是由外科医生通过几个小切口(称为端口)操纵机器人手臂进行的微创手术。手术机器人由几个主要组件组成,包括控制台,有四个互动式机器人手臂和附有外科手术器械,以及高清晰度的3D视觉系统。
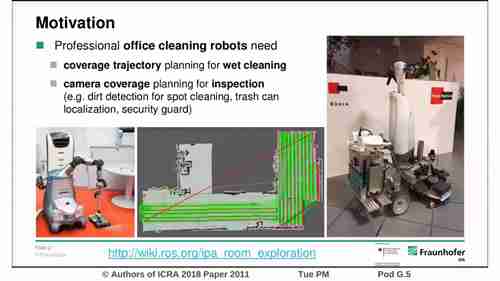
室内覆盖路径规划
覆盖路径规划指的是让机器人实现全覆盖的实时路径规划。相关应用很多,如移动扫地机器人,割草机器人等。本视频分析了在房间这样的室内覆盖路径规划过程中,采用不同算法针对550个房间进行覆盖路径规划,比较其数据上的差异。
OceanOneK水下机器人1
这款潜水机器人配备了触觉反馈系统和立体视觉,现在能够下潜一千米深入海洋,使其操作人员感觉自己也在探索沉船和其他深水目的地。?
使用触觉手套控制机器人
我们亲身体验了HaptX触觉手套与ShadowRobotCompany的极为灵巧的远程操作机器人的集成。使用这些VR手柄,我们不仅能够操纵像魔方这样复杂的物体,还可以以自然而直观的方式感受我们抓握的物体!
达芬奇机器人手术系统
达芬奇机器人手术系统是一种创新的微创手术程序。通过观看它的实际操作,了解更多关于达芬奇机器人手术系统的信息。
ROS例程:控制乌龟左右旋转
学习如何快速开始使用turtlebot模拟器及其控制。控制乌龟向左右旋转。
观看记录:








 内容总结
内容总结 章节片段
章节片段 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问