导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
161 播放
收藏
片段保存及分享
播放有问题?
请戳这里
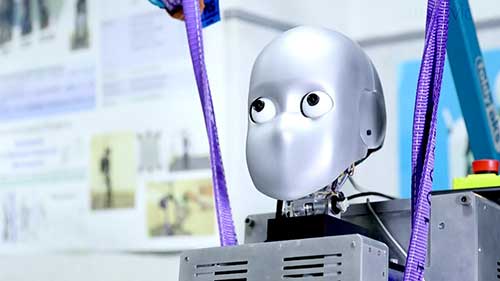
双足机器人的反馈控制
时长:4 分钟
类别:智能机器人技术
简介:CassieBlue是一个双足机器人,它的反馈控制器是一种用于控制机器人动态步行的控制系统。这个控制器是由密歇根大学的研究团队开发的,旨在使CassieBlue能够在各种复杂的环境中实现稳定的步行。
标签:
教学
智能机器人
机器人控制
相关视频:
Gazebo仿真与World文件
了解可用于Gazebo的3D可视化和仿真工具,以及机器人建模。在这里,我们将谈论仿真的重要性以及Gazebo的关键组件。
柔性机器人
有了我们的触觉传感器,夹持参数可以实时确定,并且可以动态地施加最佳夹持力。机器人通常不是柔软的,但是受章鱼启发,工程师正在创建能够扭曲解决刚性机器人无法处理的问题的机器人。
达芬奇手术机器人概述
达芬奇手术机器人是一种先进的外科手术系统,由IntuitiveSurgical公司开发。它采用了远程操作和机器辅助技术,为外科医生提供了更精确的操作平台。
Atlas和Handle机器人
波士顿动力公司的机器人Atlas和Handle是世界上最具活力的类人机器人,Atlas已经掌握了倒立、360度翻转、旋转等多项技能,Handle机器人能够载重、下蹲和跨越障碍物,再次让我们大开眼界。让我们一起去看看这两款机器人到底有多先进吧。
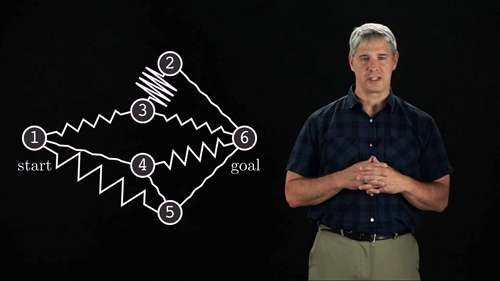
机器人路径规划4
A* 算法因为它的高效和准确而被广泛应用于路径发现和图遍历等任务上。这种算法是在图中寻找最优路径最流行和有效的方法之一。
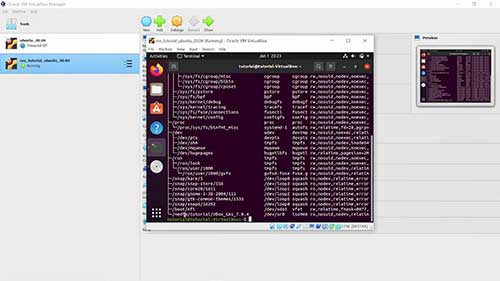
如何创建ROS工作空间01
学习如何下载Ubuntu20.04ISO镜像并在虚拟机中安装。此外,你还将学习如何在VirtualBox中最大化屏幕时调整Ubuntu的显示。
太空机器人研发挑战
NASA的太空机器人竞赛要求团队开发R5机器人,R5机器人需要具备有效地协助NASA任务(如前往火星)的能力。
O-R3户外安保机器人
O-R3是OTSAW的户外安保机器人,现在推出人脸识别技术!通过将自动驾驶和人工智能技术与出色的数据收集和分析能力相结合,O-R3为您的安全团队提供创新和关键的支持,以预防和打击犯罪。?
观看记录: