导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
198 播放
收藏
片段保存及分享
播放有问题?
请戳这里
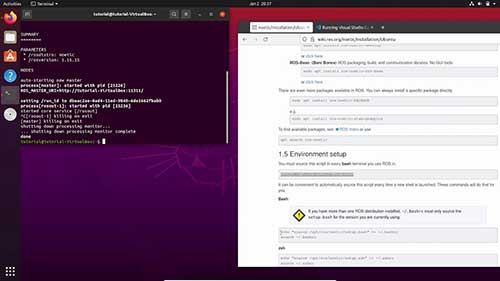
如何创建ROS工作空间03
时长:11 分钟
类别:智能机器人技术
简介:学习如何在Ubuntu20.04上下载VisualStudioCode。然后,你将创建你的第一个ROS工作空间并启动环境。
标签:
教学
智能机器人
机器人操作系统
相关视频:
了解ROS节点
节点是ROS中最重要的概念之一。每个ROS运行实例被称为节点。我们将从终端启动几个节点,以了解什么是ROS节点。
了解机器人电源
机器人要想动起来,需要多大电压,多大电流?我们将在视频中讲解机器人的电池组和电源。
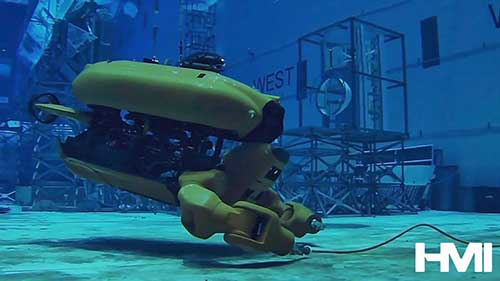
Aquanaut水下机器人
Aquanaut,由休斯顿机械公司开发,可以将自己从设计用于长途巡航的灵活潜艇转变为能够执行复杂操作任务的半人形机器人。
控制系统概述
机器人控制方法多种多样,本视频概述了运动(或位置)控制、力控制、混合运动力控制和阻抗控制等。
RoverS5安保机器人
ROVERS5机器人复合体是为沿人行道自主移动和无线传输内置视频摄像头拍摄的视频图像而设计的。这款安保机器人由带有电动驱动的轮式底盘、自动驾驶系统引导的以及独立视频监控系统组成。
机器人用传感器1
机器人变得越来越智能,这与它们分析传感器状态的能力提升有关,本视频将回顾机器人会使用的不同类型传感器,包括触觉、声音、光、超声波、速度、振动传感器等。
如何创建ROS工作空间02
学习如何在运行在虚拟机上的Ubuntu20.04上安装ROSNoetic。安装完成后,你将能够在终端上启动ROS环境。
混合运动力控制
本视频介绍了混合运动力控制:控制机器人在无约束方向上产生期望的运动和在约束方向上产生期望的力。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问