导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1584 播放
收藏
片段保存及分享
播放有问题?
请戳这里
逆向运动学2
时长:5 分钟
类别:智能机器人技术
简介:这个视频介绍了数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由一个最小坐标集合表示。
标签:
教学
智能机器人技术
逆向运动学
相关视频:
利用深度强化学习规划四足步态
ETH的Anymal研究团队为感知地形运动制订了特定的神经网络策略,在模拟三维环境中,分别使用“本体感受”和“外在感受”来执行“落脚点与肢体联动规划”。
机器人用传感器1
机器人变得越来越智能,这与它们分析传感器状态的能力提升有关,本视频将回顾机器人会使用的不同类型传感器,包括触觉、声音、光、超声波、速度、振动传感器等。
带速度输入的运动控制2
本视频介绍了单自由度系统位置的比例积分(PI)控制,以及前馈加反馈PI控制。
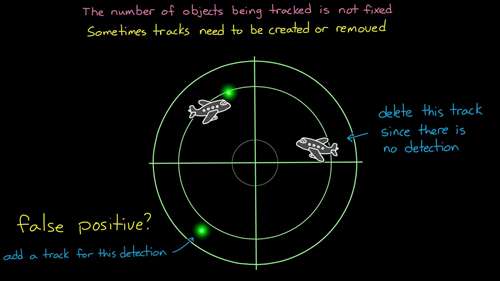
传感器融合与跟踪5
目标跟踪是利用各种类型的传感器获得的关于目标信息,对目标的真实状态以及未来的状态进行估计和预测的一门技术。这一集我们采用的是使用交互式多模型算法,来进行目标跟踪的方法。
人工智能机器人
随着人工智能技术的不断发展,智能机器人也层出不穷,视频盘点了截至2019年,研发的功能最强大的智能机器人。
多足机器人步态规划
在本视频中,我们提出了一种混合整数双层规划的凸组合算法,以一种高效的计算方式同时规划接触位置、步态过渡。
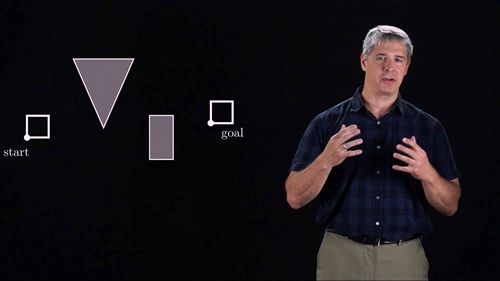
机器人路径规划5
本视频介绍了路径规划的路线图算法:如果存在一条路径,那么采用这种算法就能保证会找到这条路径。然而,该算法往往只适用于简单的、低维的问题。在视频中给出的一个例子是平面多边形在多边形障碍间转换的路径规划。
脑机接口能改变人类未来吗
想象一下,你可以用意念控制你的智能手机、电脑,用思维来打字。特斯拉首席执行官埃隆·马斯克表示,这些很快就会成为现实,让我们去看看Neuralink公司最新的研究进展吧。
观看记录: