导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1645 播放
收藏
片段保存及分享
播放有问题?
请戳这里
传感器融合与跟踪5
时长:16 分钟
类别:智能机器人技术
简介:目标跟踪是利用各种类型的传感器获得的关于目标信息,对目标的真实状态以及未来的状态进行估计和预测的一门技术。这一集我们采用的是使用交互式多模型算法,来进行目标跟踪的方法。
标签:
教学
智能机器人技术
传感器融合
相关视频:
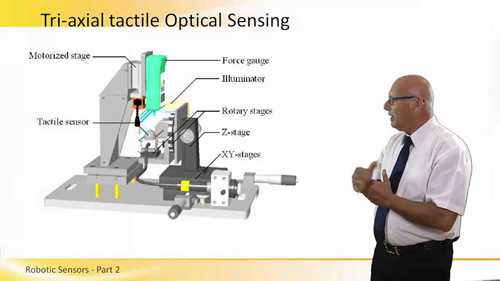
机器人用传感器2
在该教程的第一部分中,我们学习了常用的机器人传感器,那么在这一集里我们将学习一些较特殊的传感器,如,扫描传感器,旋转传感器,障碍物探测器,红外温度传感器,极化传感器等。
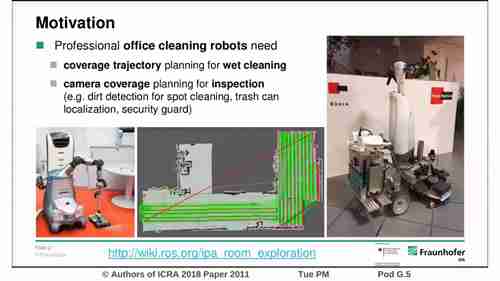
室内覆盖路径规划
覆盖路径规划指的是让机器人实现全覆盖的实时路径规划。相关应用很多,如移动扫地机器人,割草机器人等。本视频分析了在房间这样的室内覆盖路径规划过程中,采用不同算法针对550个房间进行覆盖路径规划,比较其数据上的差异。
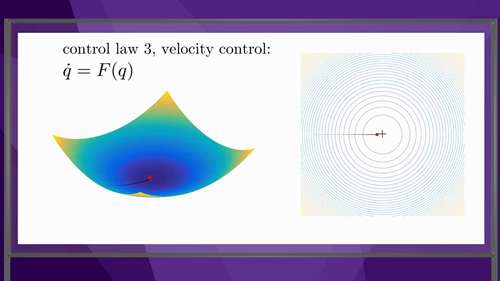
机器人路径规划8
本集介绍的是基于路径规划的人工势场法,人工势场法是局部路径规划的一种比较常用的方法。这种方法假设机器人在一种虚拟力场下运动。
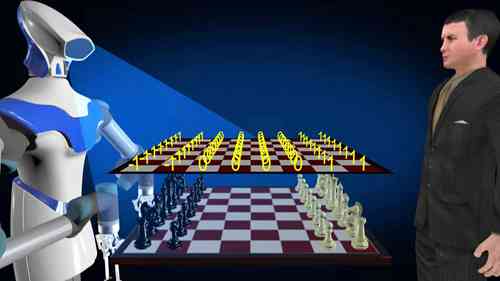
机器人的智能视觉系统
工业研究所研发出的只能视觉系统能使机器人解读自己所看到的视觉世界,根据视觉信息行动,并从经验中学习,并不断改进性能。
机器人用传感器1
机器人变得越来越智能,这与它们分析传感器状态的能力提升有关,本视频将回顾机器人会使用的不同类型传感器,包括触觉、声音、光、超声波、速度、振动传感器等。
机器人路径规划1
这个视频介绍了常见的运动规划问题,以及不同运动规划器的特性。
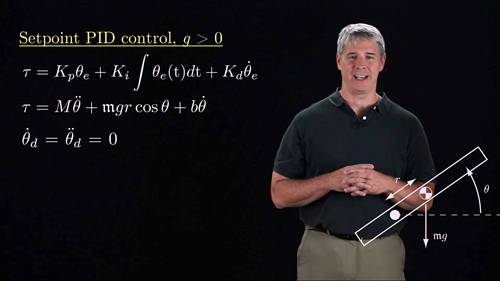
扭矩或力输入的运动控制2
这一集里,我将比较PD和PID控制对单个机器人关节在重力下运动的设定值控制,其中控制输入是一个力矩。
机器人是如何制造的
机器人已经广泛应用到了制造业当中。但现在,它们正在走进我们的日常生活。了解目前的技术是如何实现让机器人在生活的方方面面协助人类的吧,顺便看看机器人是如何制造出来的!
观看记录: