导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1513 播放
收藏
片段保存及分享
播放有问题?
请戳这里
利用深度强化学习规划四足步态
时长:9 分钟
类别:智能机器人技术
简介:ETH的Anymal研究团队为感知地形运动制订了特定的神经网络策略,在模拟三维环境中,分别使用“本体感受”和“外在感受”来执行“落脚点与肢体联动规划”。
标签:
教学
智能机器人技术
多足机器人
相关视频:
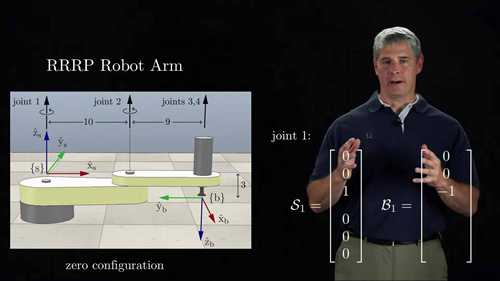
正向运动学3
我将在视频中演示指数积正运动学在RRRP机器人手臂上的应用。
行李运输机器人
人工智能是当今炙手可热的领域,其应用在医疗、刑侦、艺术等领域都被广泛应用。那么我们来看看人工智能在机场的应用。本视频展示了美国达拉斯市福特·伍斯机场机器人为国际航线旅客实施行李转运。
带速度输入的运动控制2
本视频介绍了单自由度系统位置的比例积分(PI)控制,以及前馈加反馈PI控制。
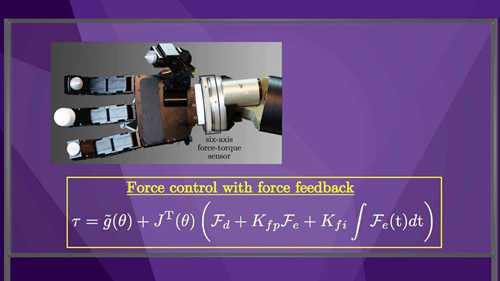
力控制
本教程描述了机器人基于雅可比矩阵转置的力控制,包括有和没有末端执行器力-力矩反馈。
机器人路径规划1
这个视频介绍了常见的运动规划问题,以及不同运动规划器的特性。
索菲亚机器人
机器人索菲亚是一款有着非常逼真的外表和举止,与人互动能力很高的仿人机器人。疫情期间,索菲亚生产商决定量产这款机器人,以帮助世界应对疫情。
Atlas和Handle机器人
波士顿动力公司的机器人Atlas和Handle是世界上最具活力的类人机器人,Atlas已经掌握了倒立、360度翻转、旋转等多项技能,Handle机器人能够载重、下蹲和跨越障碍物,再次让我们大开眼界。让我们一起去看看这两款机器人到底有多先进吧。
正向运动学1
我将在视频中介绍开链机器人正运动学中,在空间坐标系中表示的指数积公式。
观看记录: