导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1587 播放
收藏
片段保存及分享
播放有问题?
请戳这里
扭矩或力输入的运动控制3
时长:8 分钟
类别:智能机器人技术
简介:该教程介绍了机器人计算力矩运动的控制方法,其中控制输入是力矩或力。
标签:
教学
智能机器人技术
控制系统
相关视频:
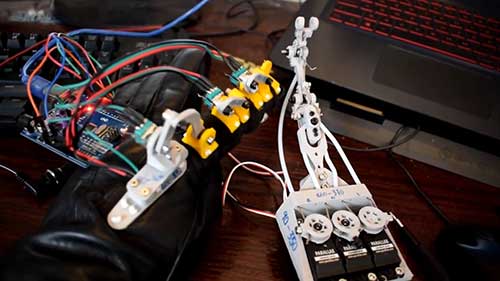
仿生机械手 02 设计仿生手伺服
手部的另一个关节称为MCP(掌指)关节,我们将了解掌指关节的设计和一些定制伺服系统,不断进行实验,以找到合适的仿生手伺服系统。
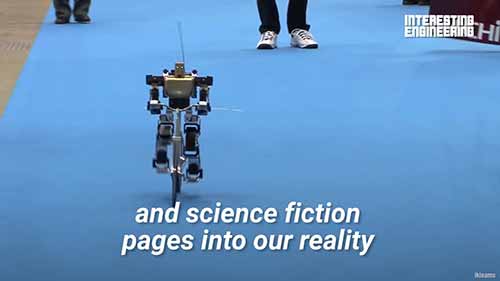
机器人是如何制造的
机器人已经广泛应用到了制造业当中。但现在,它们正在走进我们的日常生活。了解目前的技术是如何实现让机器人在生活的方方面面协助人类的吧,顺便看看机器人是如何制造出来的!
用大脑来控制物体
OpenBCI是一个基于脑机接合的开源硬件,它允许艺术家、设计师和工程师进行创新,同时作为研究和创新的工具。你可以在这里用大脑控制玩具蜘蛛,玩具鲨鱼。
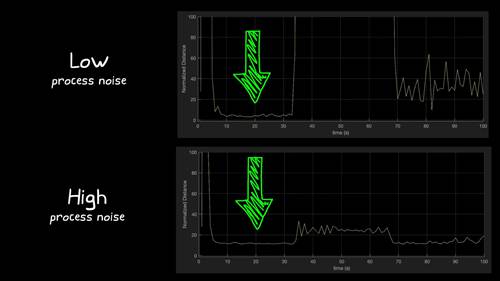
传感器融合与跟踪4
本视频解释了如何通过使用交互式多模型滤波器估计状态来改善跟踪单个对象。
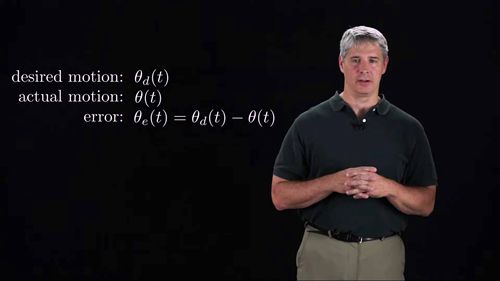
误差响应
在这一集中,我将介绍一个被控制系统的误差响应,并根据其稳态误差和瞬态响应来描述误差响应。
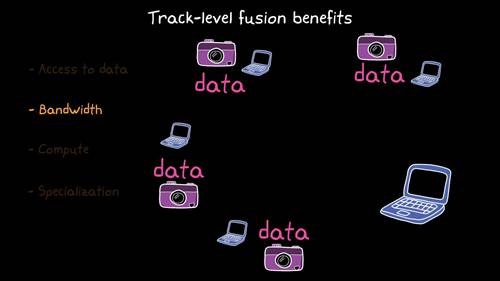
传感器融合与跟踪6
您将在视频中看到两种不同的跟踪体系结构,并了解如何选用适合的跟踪体系结构。
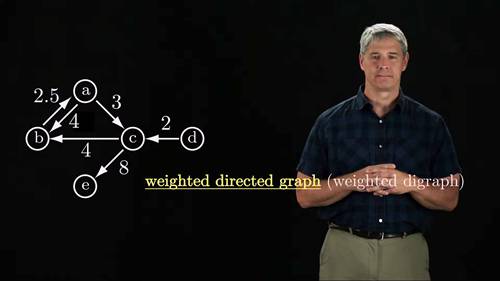
机器人路径规划3
这一集机器人路径规划教程主要介绍了机器人C空间图表算法的无向图、有向图、加权图、非加权图,以及树型图。
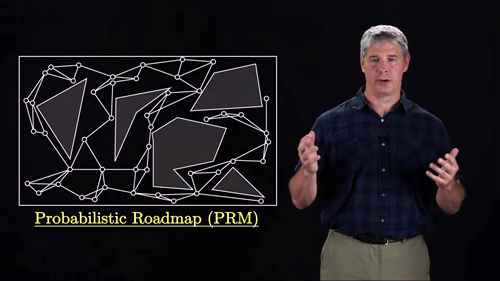
机器人路径规划7
PRM是一种基于图搜索的方法,它将连续空间转换成离散空间,再利用A*等搜索算法在路线图上寻找路径,以提高搜索效率。
观看记录: