导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1730 播放
收藏
片段保存及分享
播放有问题?
请戳这里
传感器融合与跟踪6
时长:16 分钟
类别:智能机器人技术
简介:您将在视频中看到两种不同的跟踪体系结构,并了解如何选用适合的跟踪体系结构。
标签:
教学
智能机器人技术
传感器融合
相关视频:
仿生机械手 03 仿生手指原型设计
使用FDM打印和Arduino,在Fusion 360中进行设计仿生手指原型,最后测试仿生手的三个连续关节。
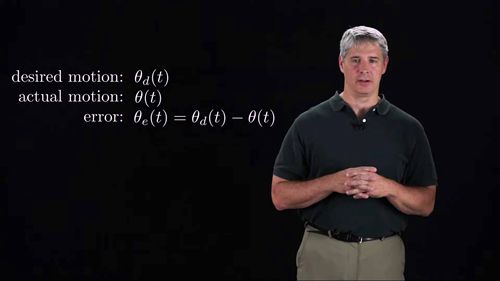
误差响应
在这一集中,我将介绍一个被控制系统的误差响应,并根据其稳态误差和瞬态响应来描述误差响应。
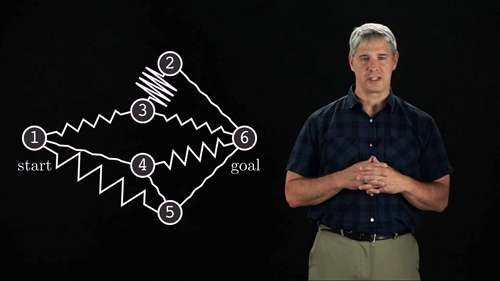
机器人路径规划4
A* 算法因为它的高效和准确而被广泛应用于路径发现和图遍历等任务上。这种算法是在图中寻找最优路径最流行和有效的方法之一。
带速度输入的运动控制2
本视频介绍了单自由度系统位置的比例积分(PI)控制,以及前馈加反馈PI控制。
5G机器人控制器
5G技术使科技领域又一次取得了巨大突破。本视频的主人公就是采用5G控制技术的丰田第三代仿人机器人T-HR3,它的本领一定会令你目瞪口呆。
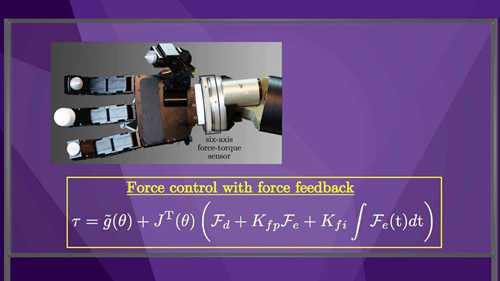
力控制
本教程描述了机器人基于雅可比矩阵转置的力控制,包括有和没有末端执行器力-力矩反馈。
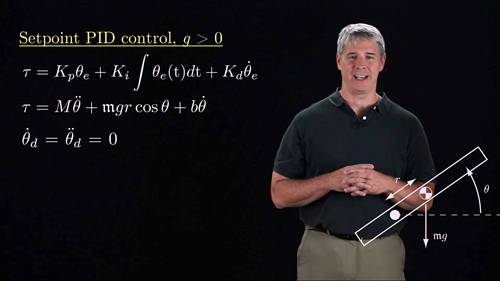
扭矩或力输入的运动控制2
这一集里,我将比较PD和PID控制对单个机器人关节在重力下运动的设定值控制,其中控制输入是一个力矩。
人工智能机器人
随着人工智能技术的不断发展,智能机器人也层出不穷,视频盘点了截至2019年,研发的功能最强大的智能机器人。
观看记录: