导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1510 播放
收藏
片段保存及分享
播放有问题?
请戳这里
仿生机械手 02 设计仿生手伺服
时长:5 分钟
类别:智能机器人技术
简介:手部的另一个关节称为MCP(掌指)关节,我们将了解掌指关节的设计和一些定制伺服系统,不断进行实验,以找到合适的仿生手伺服系统。
标签:
教学
智能机器人技术
机械手
相关视频:
5G机器人控制器
5G技术使科技领域又一次取得了巨大突破。本视频的主人公就是采用5G控制技术的丰田第三代仿人机器人T-HR3,它的本领一定会令你目瞪口呆。
人工智能机器人
随着人工智能技术的不断发展,智能机器人也层出不穷,视频盘点了截至2019年,研发的功能最强大的智能机器人。
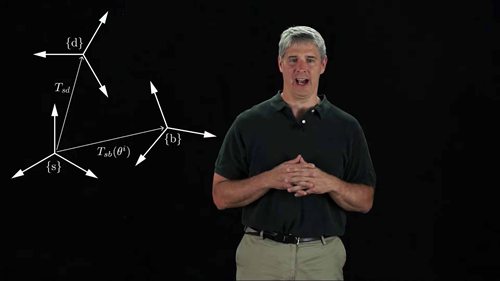
逆向运动学3
这一集将延续上一集的内容,介绍数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由变换矩阵表示。
未来的智能机器人
机器人的发展史犹如人类的文明和进化史在不断地向着更高级发展。目前为止,智能机器人技术取得了哪些发展?是否真的马上就会像科幻片中的那样取代人类了呢?
带速度输入的运动控制2
本视频介绍了单自由度系统位置的比例积分(PI)控制,以及前馈加反馈PI控制。
机器人在拥挤动态环境中的自主导航
本视频讲解的是一种新的路径规划算法,用于机器人在拥挤行人环境中导航。与许多其他的路径规划算法(假设与其他行人协作)不同,该算法是完全独立的。
蓝眼技术
想象一下电脑有了七情六欲,能识别用户面部信息,根据用户情绪来与其互动,那会是怎样一番情形。而这一切并不是天方夜谭,通过“蓝眼技术”就能实现。
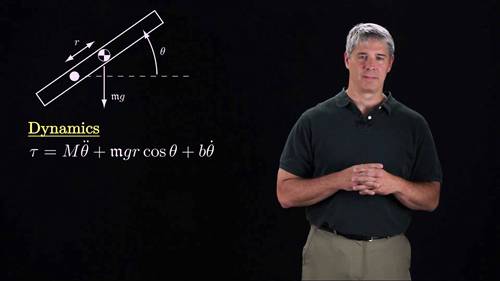
扭矩或力输入的运动控制1
本视频介绍了针对单个机器人关节的比例积分导数(PID)控制。
观看记录: