导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
164 播放
收藏
片段保存及分享
播放有问题?
请戳这里
ROS架构解析02
时长:13 分钟
类别:智能机器人技术
简介:ROS中每个程序包是一个节点,ROS中有四种通信方式:参数、话题、服务、行动。本集我们将介绍服务和行动。
标签:
教学
智能机器人
机器人操作系统
相关视频:
手术机器人的发展
手术机器人是一项医疗技术创新,旨在减少侵入性手术的误差范围,有助于使外科手术更安全、更精确。医疗保健正在经历技术颠覆,手术机器人的发展正在帮助外科医生进行更少侵入性的手术。
达芬奇手术机器人概述
达芬奇手术机器人是一种先进的外科手术系统,由IntuitiveSurgical公司开发。它采用了远程操作和机器辅助技术,为外科医生提供了更精确的操作平台。
未来的创新型机器人
今天的节目中,我们来到了卡耐基梅隆大学,在那里我们将欣赏他们研制出的一系列最新奇的机器人,看看它们将如何帮助人类改善生活。
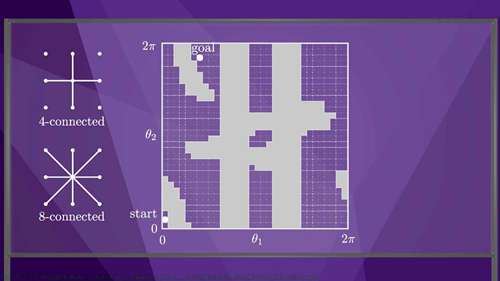
机器人路径规划6
这一集介绍的是用于机器人路径规划的网格算法,其中自由c空间可以使用标准图进行搜索的正则网格表示,为了提高效率,也可以使用多分辨率网格。
机器人在拥挤动态环境中的自主导航
本视频讲解的是一种新的路径规划算法,用于机器人在拥挤行人环境中导航。与许多其他的路径规划算法(假设与其他行人协作)不同,该算法是完全独立的。
机器人控制应用概述
介绍了德国航空航天中心开发的扭矩控制人形机器人TORO的硬件和控制应用。
Bella服务机器人
BellaBot是一种机器人服务员,专门设计用于在餐厅、酒店和其他服务行业中为顾客提供服务。
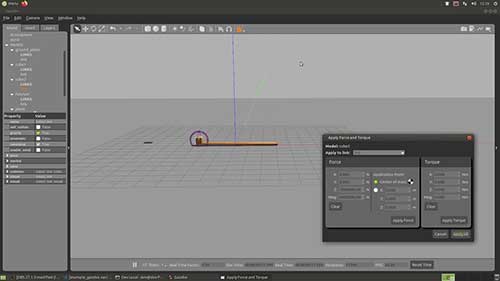
机器人建模
Gazebo是一款免费的机器人仿真软件,我们学习如何使用Gazebo模拟器以及ROS操作系统搭建机器人。
观看记录:







 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问