导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1464 播放
收藏
片段保存及分享
播放有问题?
请戳这里
传感器融合与跟踪2
时长:16 分钟
类别:智能机器人技术
简介:该视频介绍了如何使用磁力计,加速计和陀螺仪估算物体的方向。目的是展示这些传感器如何为解决方案做出贡献,并解释一些注意事项。
标签:
教学
智能机器人技术
传感器融合
相关视频:
扭矩或力输入的运动控制3
该教程介绍了机器人计算力矩运动的控制方法,其中控制输入是力矩或力。
Atlas和Handle机器人
波士顿动力公司的机器人Atlas和Handle是世界上最具活力的类人机器人,Atlas已经掌握了倒立、360度翻转、旋转等多项技能,Handle机器人能够载重、下蹲和跨越障碍物,再次让我们大开眼界。让我们一起去看看这两款机器人到底有多先进吧。
通过脑机接口技术获得触觉
美国国防部高级研究计划局首次在人体上演示了一项前沿技术,即将机械臂与神经系统相连接,让个体从大脑中感知触觉。
机器人的智能视觉系统
工业研究所研发出的只能视觉系统能使机器人解读自己所看到的视觉世界,根据视觉信息行动,并从经验中学习,并不断改进性能。
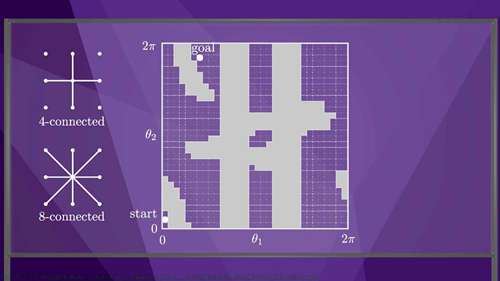
机器人路径规划6
这一集介绍的是用于机器人路径规划的网格算法,其中自由c空间可以使用标准图进行搜索的正则网格表示,为了提高效率,也可以使用多分辨率网格。
最先进的四足机器人
机器人行业发展非常迅速,市场上已经有很多不同类型的四足机器人,用于完成不同的任务,今天我们将挑选其中最有趣、最先进的一些四足机器人,看看它们都有哪些本领吧。
神经接口简述
神经接口、脑机接口等技术具有非凡的潜力。这些技术可以改变医学,从根本上改变我们与技术之间的互动方式。
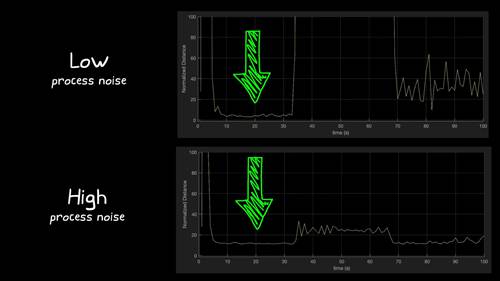
传感器融合与跟踪4
本视频解释了如何通过使用交互式多模型滤波器估计状态来改善跟踪单个对象。
观看记录: