导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1411 播放
收藏
片段保存及分享
播放有问题?
请戳这里
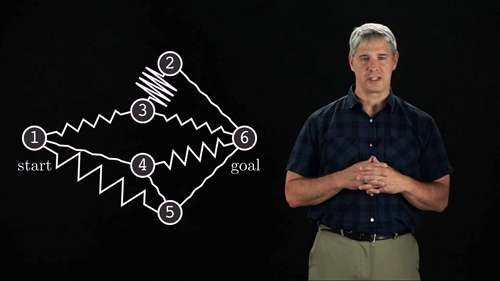
逆向运动学1
时长:4 分钟
类别:智能机器人技术
简介:这个视频介绍了逆运动学问题——推导出期望的末端执行器位置的所需要的关节位置构型。
标签:
教学
智能机器人技术
逆向运动学
相关视频:
传感器融合与跟踪6
您将在视频中看到两种不同的跟踪体系结构,并了解如何选用适合的跟踪体系结构。
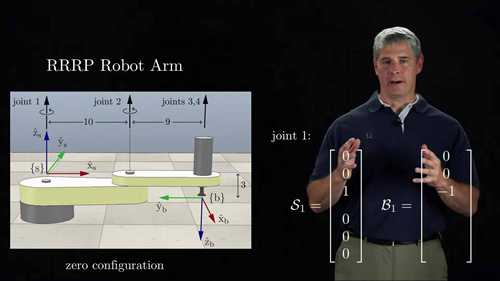
正向运动学3
我将在视频中演示指数积正运动学在RRRP机器人手臂上的应用。
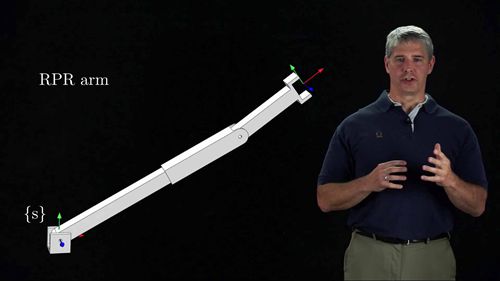
正向运动学1
我将在视频中介绍开链机器人正运动学中,在空间坐标系中表示的指数积公式。
带速度输入的运动控制3
这段短片介绍了机器人的任务空间运动控制,其中控制输入为关节速度,末端执行器的期望运动表示为SE(3)中的位形X。
自动送货机器人
打开手机,点了一个外卖,过了一会儿,你收到提示说你的外卖已送达。打开门,一个造型可爱的机器人在你的门外。你取走外卖,机器人和你再见。这已经成为了现实。6个自动送货机器人分别名为Starship、Kiwi、Robomart、TeleRetailRobot、AmazonScout、FedExSameDayBot已经开始被使用,它们可能成为未来餐饮外卖的主流。
机器人路径规划4
A* 算法因为它的高效和准确而被广泛应用于路径发现和图遍历等任务上。这种算法是在图中寻找最优路径最流行和有效的方法之一。
阿西莫机器人发展史
阿西莫是一种智能机器人,由日本本田公司于1986年开始研制,那么在这40多年的时间里,这款类人机器人取得了怎样的进展呢?我们将为你回顾阿西莫的发展史。
线性误差动力学
本视频介绍了线性误差响应,误差动力学由线性常微分方程来描述,也可以表示为一阶耦合微分方程,xdot = Ax。
观看记录: