导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1546 播放
收藏
片段保存及分享
播放有问题?
请戳这里
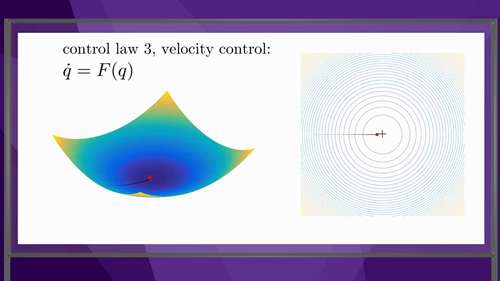
控制系统概述
时长:4 分钟
类别:智能机器人技术
简介:机器人控制方法多种多样,本视频概述了运动(或位置)控制、力控制、混合运动力控制和阻抗控制等。
标签:
教学
智能机器人技术
控制系统
相关视频:
机器人路径规划8
本集介绍的是基于路径规划的人工势场法,人工势场法是局部路径规划的一种比较常用的方法。这种方法假设机器人在一种虚拟力场下运动。
索菲亚机器人
机器人索菲亚是一款有着非常逼真的外表和举止,与人互动能力很高的仿人机器人。疫情期间,索菲亚生产商决定量产这款机器人,以帮助世界应对疫情。
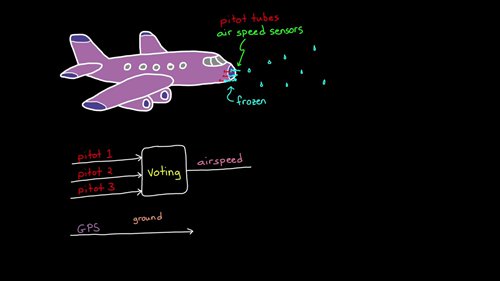
传感器融合与跟踪1
本视频概述了传感器融合的概念,以及它对于设计自主系统所起到的作用。
脑机接合
埃隆·马斯克开创的Neuralink公司正在开辟一条通往人类数字化的道路,研究对象为“脑机接口”技术,利用电流让电脑和脑细胞“互动”。
未来的智能机器人
机器人的发展史犹如人类的文明和进化史在不断地向着更高级发展。目前为止,智能机器人技术取得了哪些发展?是否真的马上就会像科幻片中的那样取代人类了呢?
控制系统概述
机器人控制方法多种多样,本视频概述了运动(或位置)控制、力控制、混合运动力控制和阻抗控制等。
神经接口简述
神经接口、脑机接口等技术具有非凡的潜力。这些技术可以改变医学,从根本上改变我们与技术之间的互动方式。
仿生机械手 04 CMC关节
我们来看看CMC(腕掌)关节的生物力学、解剖学和运动学,以及它们如何与当代仿生手设计相联系。
观看记录: