导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
思维导图
深度学习
学科拓展
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1813 播放
收藏
片段保存及分享
播放有问题?
请戳这里
误差响应
时长:3 分钟
类别:智能机器人技术
简介:在这一集中,我将介绍一个被控制系统的误差响应,并根据其稳态误差和瞬态响应来描述误差响应。
标签:
教学
智能机器人技术
控制系统
相关视频:
何谓ROS消息
介绍ROS的几个重要话题通信以及消息命令,并旨在为ROS用户提供对各种概念的基础理解,了解不同项目的基础知识和应用。
阿西莫机器人发展史
阿西莫是一种智能机器人,由日本本田公司于1986年开始研制,那么在这40多年的时间里,这款类人机器人取得了怎样的进展呢?我们将为你回顾阿西莫的发展史。
仿海扁虫机器人
你知道海扁虫是怎么游的吗?没关系,看看这个仿海扁虫机器鱼,你就知道了!
ROS基础概述
简要介绍了ROS(机器人操作系统)。你将了解什么是ROS(机器人操作系统)以及为什么我们需要它来开发机器人。
Angatec多功能消防机器人
AngatecTEC800是市场上最多功能的消防机器人。本片将展示这款消防机器人的功能。
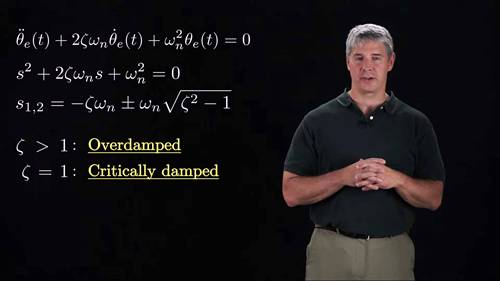
二阶误差动力学
本视频研究的是以二阶线性常微分方程来描述的误差动力学模型。
仿生机器人
飯田史也的研究探讨了如何通过从自然中汲取灵感来改进机器人技术,飯田的实验室里有各种跳跃机器人,可能受到蚱蜢、人类甚至恐龙的启发。
Gazebo仿真与World文件
了解可用于Gazebo的3D可视化和仿真工具,以及机器人建模。在这里,我们将谈论仿真的重要性以及Gazebo的关键组件。
观看记录:






 内容总结
内容总结 章节片段
章节片段 思维导图
思维导图 深度学习
深度学习 学科拓展
学科拓展 追问
追问